Lokalisierungs- und Kommunikationssystem zur betriebsbegleitenden Fertigungsplanung und -steuerung
 © Daniel Arnold
© Daniel Arnold
| E-Mail: | Arnold@ifw.uni-hannover.de |
| Team: | IFW, ATS Elektronik GmbH, Fauser AG |
| Year: | 2019 |
| Date: | 30-01-20 |
| Funding: | Aif |
| Duration: | 12/2019-03/2022 |
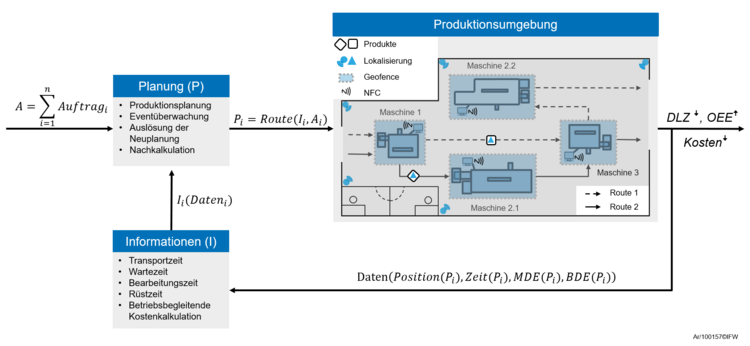
Zur Verbesserung der Planungsdatenbasis und der Produktion von Bauteilen soll ein neuartiges drahtloses Lokalisierungs-, Kommunikations- und Prozessleitsystem unter Verwendung von Positions-, Betriebs- und Maschinendaten entwickelt werden. Dieses soll Bauteile in den jeweiligen Transportcontainern jederzeit in der Fertigungshalle orten. Als Transportmedium der Positions-, Betriebs- und Maschinendaten kommen drahtlose BLE Beacons mit dem neuen Standard Bluetooth 5 zum Einsatz. Die Beacons durchlaufen gemeinsam mit einem Auftrag die Fertigung. Des Weiteren kommen Transceivergateways zum Einsatz, die die Daten der Beacons empfangen und an eine Empfangs- und Positionsbestimmungssoftware weiterleiten. Von hier aus werden die Daten an das Planungssystem übergeben.
Neben der Ortung wird der Beacon zur Erfassung der Bearbeitungszeit an der jeweiligen Maschine dienen. Durch die Integration einer Near Field Communication (NFC) Schnittstelle im Beacon wird die Übertragung von Maschinendaten an den Beacon realisiert. Sobald ein Produktionsmitarbeiter den Beacon auf ein NFC-Lese-/Schreibgerät bei der jeweiligen Maschine legt, beginnt die Zeitmessung. Wird dieser vom NFC-Lese-/Schreibgerät entfernt, wird für den Auftrag die Zeiterfassung unterbrochen bzw. beendet.
Darüber hinaus soll neben dem Standort und der Bearbeitungszeit unter Verwendung von Maschinensignalen zu jedem Prozess der Maschinenstatus erfasst werden. Über die NFC Schnittstelle sollen die benötigten Maschinendaten bauteil- oder auftragsbezogen erfasst und an das übergeordnete Planungssystem weitergeleitet werden. Der identifizierte Maschinenzustand wird dort mit der Zeitmessung synchronisiert. Dadurch wird identifiziert, wie lange die Maschine zum Beispiel wartet, gerüstet wird oder produziert. Aus den Bewegungsdaten des Ortungssystems, der Zeitmessung und den Maschinendaten kann die Gesamtdurchlaufzeit sowie die Verteilung von Bearbeitungs-, Rüst-, Liege- und Transportzeit bestimmt werden. Unter zusätzlicher Verwendung hinterlegter Kostensätze (z. B. Werkzeugkosten, Maschinenstundensätze) kann damit betriebsbegleitend die Kostenkalkulation für einzelne Bauteile oder ganze Aufträge erfolgen. Durch die im Projekt angestrebte technische Innovation des zu entwickelnden Systems wird eine deutlich verbesserte Informationsgrundlage ermöglicht, die bessere Planungsentscheidungen in der Fertigung ermöglicht. Dies kann beispielsweise darin resultieren, dass ausgehend vom aktuellen Planungszustand betriebsbegleitend eine kostengünstigere Alternativroute durch die Fertigung ermittelt wird.



















